Selbstausgleichender Roller: Unterschied zwischen den Versionen
Aus OHO - search engine for sustainable open hardware projects
K |
K |
||
| (Eine dazwischenliegende Version desselben Benutzers wird nicht angezeigt) | |||
| Zeile 22: | Zeile 22: | ||
|maturity=PDIY | |maturity=PDIY | ||
|product_category=Vehicles & Parts | |product_category=Vehicles & Parts | ||
|licence=UNLIC | |||
|mechanical_licence=UNLIC | |||
|design_files_pub=yes | |design_files_pub=yes | ||
|cad_files_editable=no | |cad_files_editable=no | ||
Aktuelle Version vom 1. September 2019, 01:48 Uhr
Projektdaten
|
Selbstausgleichender Roller Grundinformationen Kategorien: Mobilität, Logistik URL (erste Veröffentlichung): http://members.optusnet.com.au/~a4x4kiwi/scooter/ Schlüsselbegriffe: Dreirad, lastendreirad, Transport dreirad Lizenz: Unlicense Projektstatus: Inaktiv
Technische Dokumentation Reifegrad des Projektes: produktion / DIY
CAD-Dateien können bearbeitet: Nein Montageanleitungen sind veröffentlicht: Nein Stückliste ist veröffentlicht: Ja
no no
Projektmanagement
Open-o-meter: 3 Produktkategorie: Vehicles & Parts
|
|





Beschreibung
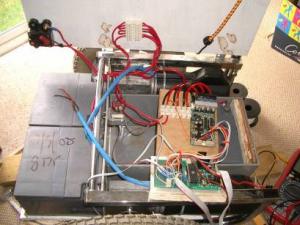
Dies ist ein Projekt, über das ich seit einigen Jahren nachgedacht habe, seit ich den (http://www.segway.com Segway) zum ersten Mal im Internet gesehen habe. Dieses Projekt vereint mehrere meiner Leidenschaften: Elektronik, Mechanik, Steuerungssysteme und Software.
+ Allgemeine Bewertungen 